A Less Forgiving Alarm Clock
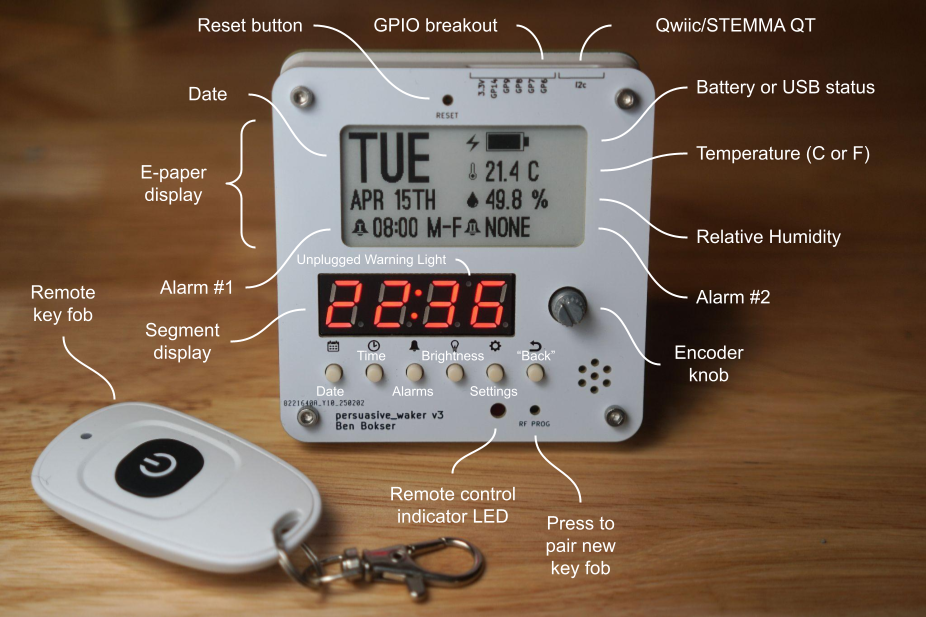
So I made my own alarm clock. It has no snooze button and no off button. It also has a backup battery in case it gets unplugged, and there’s no way to remove the battery without a hex key. Actually deactivating the alarm requires hitting a remote key fob. The idea is to hide the key fob as far away from your bed as possible. Obviously this is more effective the larger your home is. ...