The REx Hopper is now capable of balancing! However, it suffers from extreme oscillation at a relatively low frequency (about 8 Hz).
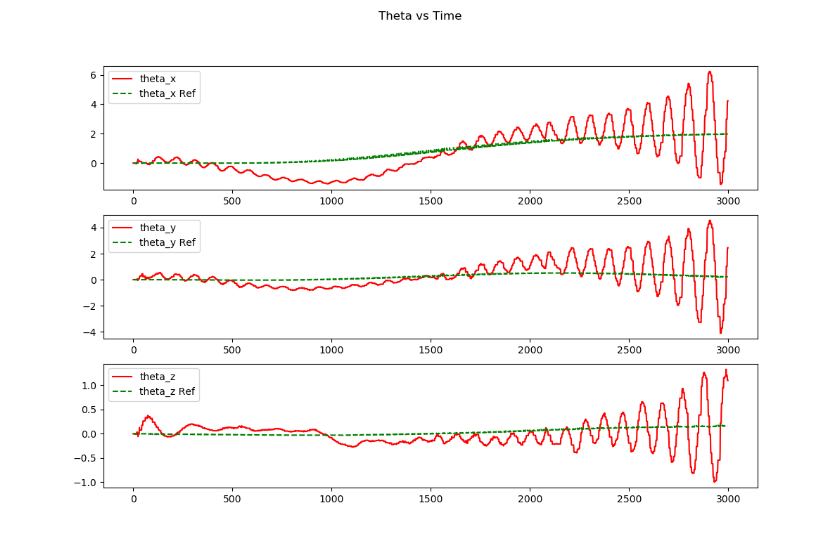
This looks like a controller issue–perhaps even a simple matter of gain tuning–until you look closer and slow the footage down. It’s a clear case of mechanical resonance–notice how much the leg flexes back and forth.
Unfortunately, I designed this leg with excessive focus on machining cost and ease of assembly, which led to the use of cantilevered joints and the use of, in retrospect, tiny bearings and shoulder screws. As it turns out, what may work for a simple quadruped doesn’t apply here. High bending stiffness is crucial for an inverted reaction wheel pendulum.
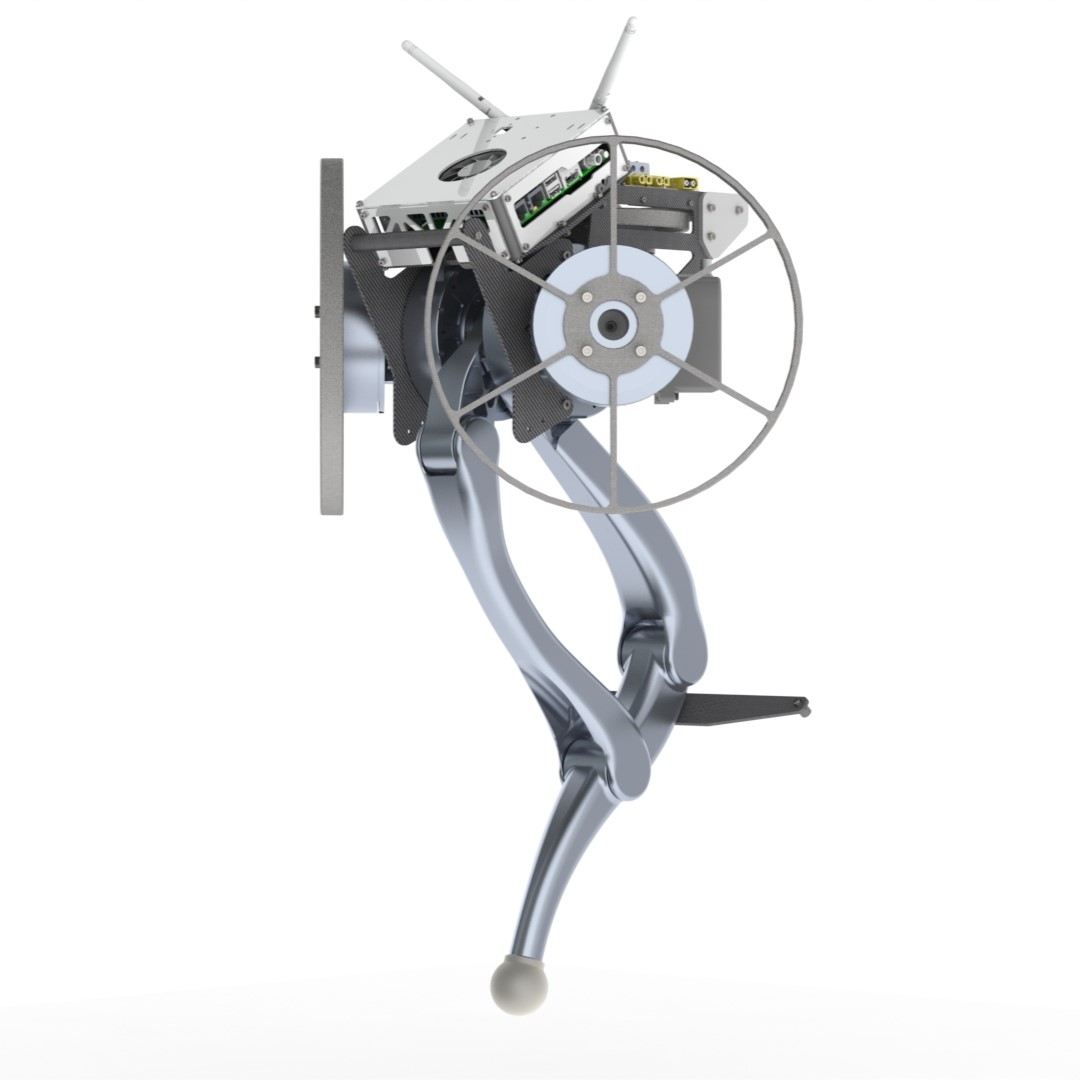
With that lesson learned, I am now finishing up a much improved leg design. This design will not be concerned with cost, but rather purely optimal stiffness and strength-to-weight ratio. Within reason, of course. That means “clamshelled” aluminum links (to get hollow, near-circular cross-sections, which maximize second moment of area uniformly w.r.t. cross-sectional area) and massive clevis joints.
Here’s a hint at what that looks like (still a W.I.P.):
Of course, there are ways to circumvent this issue with model-based control. One can model the leg as a set of links with flexible joints. But it’s best to just fix this mechanically and leave that as a last resort.