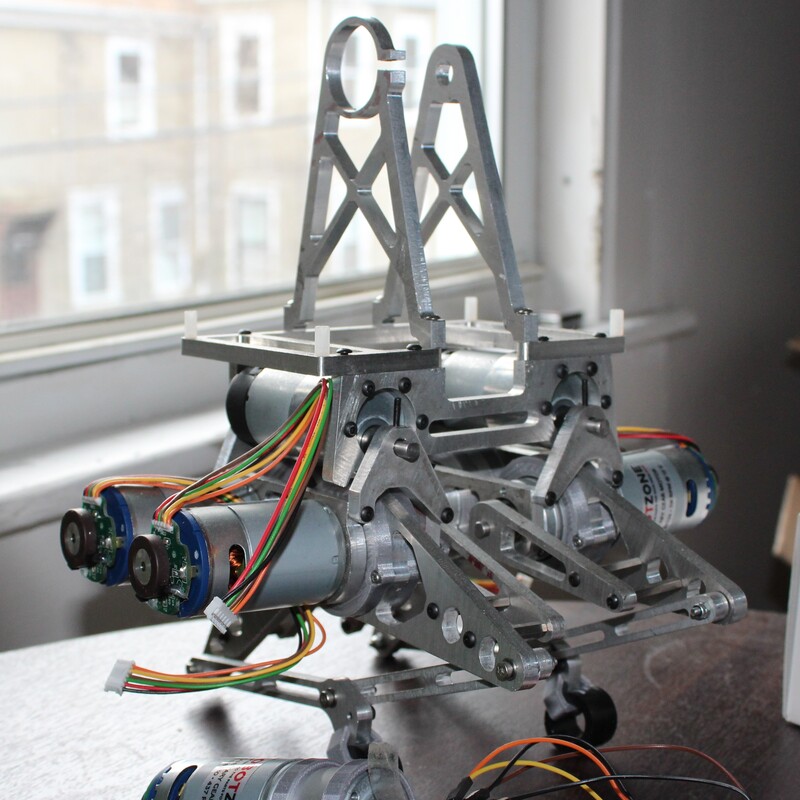
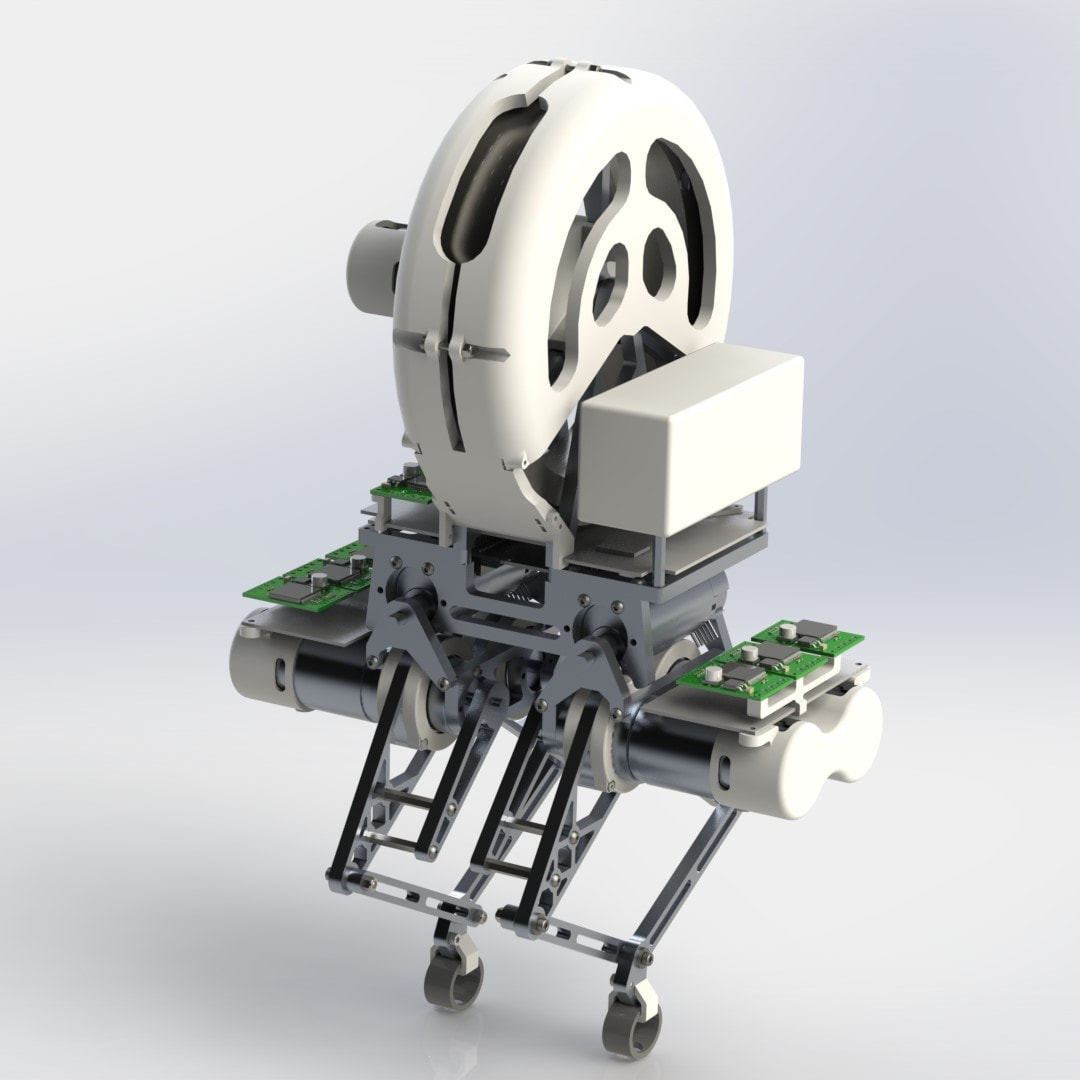
I designed this robot during my sophomore year of undergrad and developed a basic controller for it in Simulink. The idea was to avoid ankle actuation by stabilizing the robot’s pitch using a large reaction wheel.
It sat on the shelf for a couple of years after the initial build. Then, in 2018, I finally got around to adding the embedded electronics (controlled via STM32F4) and power distribution.
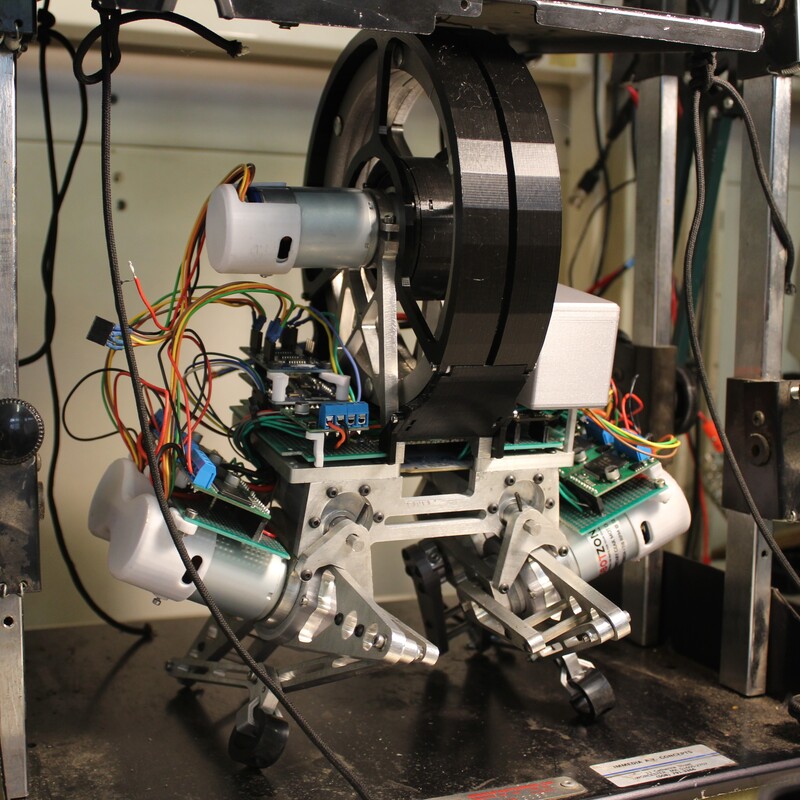
It… did not work very well. The mechanical design was terrible. The machining tolerances were awful, the bearings weren’t properly pressed, and I was using cheap brushed gearmotors which had voltage deadband, high inertia, and high backlash. A geared reaction wheel on an inverted pendulum? What was I thinking!?
The lessons I learned the hard way from this failure greatly influenced how I approached subsequent robotics projects, such as Spryped and REx Hopper.
Later, I recycled the reaction wheel for the RW Quad.