On the Optimal Design of Cantilever Beams
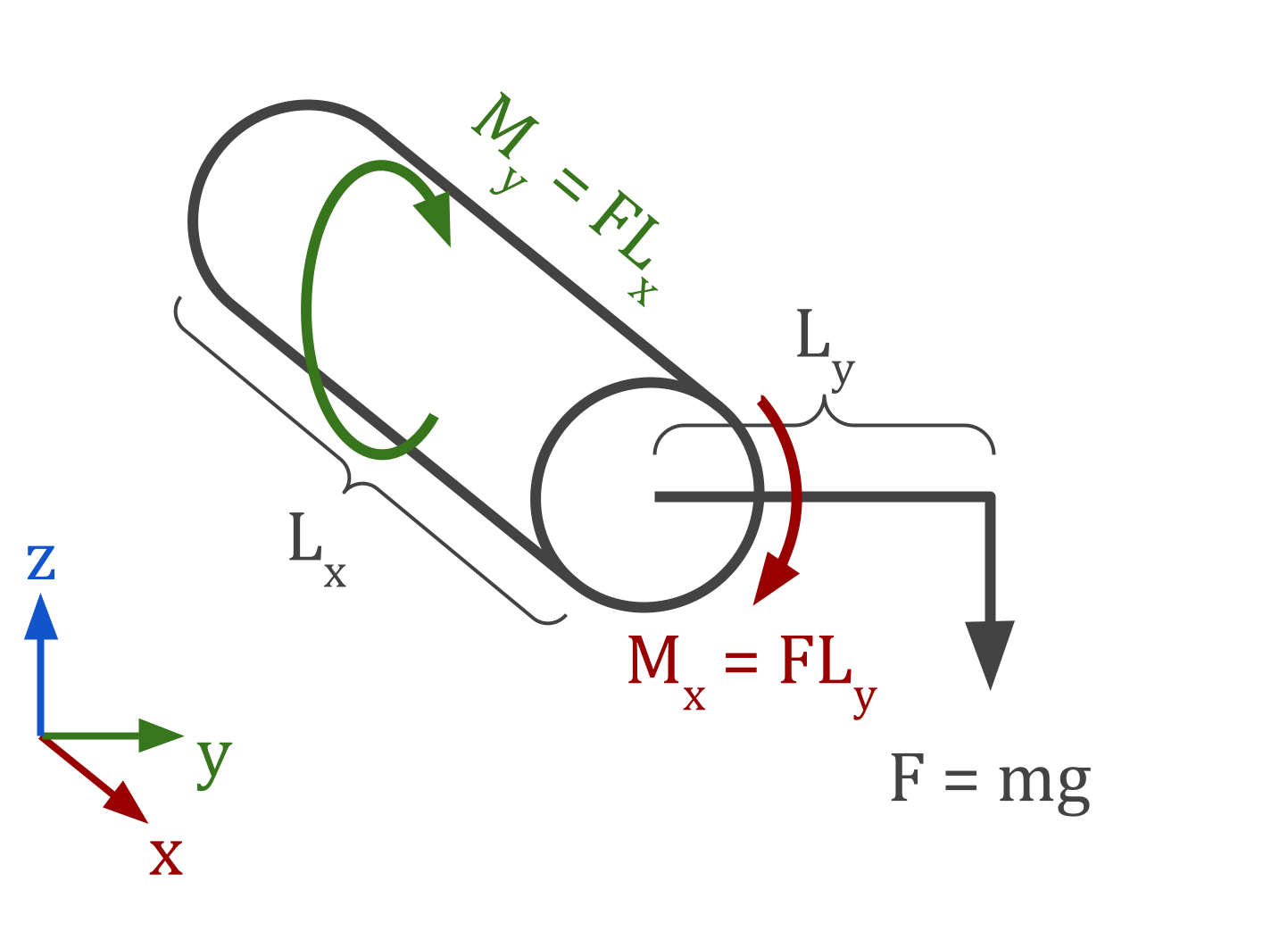
The Problem Let’s say we need to design a structural section of a robot arm, as shown. We’ve been given a few requirements: The mass of the component must be minimized at all costs. The length of the link must be 300 mm. The maximum allowed deflection (caused by the component) is 1 mm. The combined mass of the maximum payload and end-effector is 30 kg. The combined center of mass of the payload and end-effector is 50 mm from the joint. Both the base and end-effector joints can rotate in any axis. We are allowed to assume that the arm does not move dynamically, so that our analysis can be static-only. ...